 在国内制造业转型升级的推动下,结合焊接领域劳动力短缺及用工成本上升等多重因素,焊接自动化与智能化已成为行业发展的重要趋势,体现在对生产效率的显著提升、焊接质量的一致性保障以及对市场需求变化的快速响应。通过引入先进技术,如人工智能和机器视觉,焊接过程变得更加精准和灵活,能够有效降低人为因素带来的风险。同时,智能化系统的应用有助于实现数据驱动的决策,从而优化生产流程和资源配置,进一步推动行业向高效、低成本和高质量的方向发展。
在国内制造业转型升级的推动下,结合焊接领域劳动力短缺及用工成本上升等多重因素,焊接自动化与智能化已成为行业发展的重要趋势,体现在对生产效率的显著提升、焊接质量的一致性保障以及对市场需求变化的快速响应。通过引入先进技术,如人工智能和机器视觉,焊接过程变得更加精准和灵活,能够有效降低人为因素带来的风险。同时,智能化系统的应用有助于实现数据驱动的决策,从而优化生产流程和资源配置,进一步推动行业向高效、低成本和高质量的方向发展。
 2 强光/弧光导致视觉方案成像不清晰
2 强光/弧光导致视觉方案成像不清晰
 3 现场部署复杂开发成本高
3 现场部署复杂开发成本高 4 对器件热稳定性要求高
4 对器件热稳定性要求高

焊接领域主流视觉方案技术原理
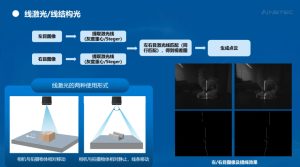 线激光适用于高精度要求的场景,但其在焊接应用中也存在一些局限性。例如,由于其采用逐点扫描,扫描速度相较于3D结构光稍显缓慢,从而影响焊接效率。此外,精密的激光系统成本较高,增加了设备及维护的费用。
线激光适用于高精度要求的场景,但其在焊接应用中也存在一些局限性。例如,由于其采用逐点扫描,扫描速度相较于3D结构光稍显缓慢,从而影响焊接效率。此外,精密的激光系统成本较高,增加了设备及维护的费用。
2.面结构光/3D结构光是指投射相移条纹+格雷码条纹,通过解算相位的方式匹配同名点。
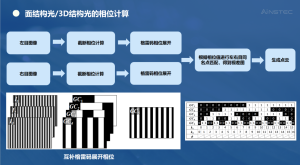 面结构光/3D结构光技术更适合于大范围工件的快速扫描,这一技术通过投射光栅并分析其变形来获取三维信息,从而实现较快的扫描速度,有助于提高焊接效率。然而,3D结构光技术也存在一些局限性,由于其基于光栅投影,精度通常低于线激光相机,因此在高精度焊接场景中可能表现不足。
面结构光/3D结构光技术更适合于大范围工件的快速扫描,这一技术通过投射光栅并分析其变形来获取三维信息,从而实现较快的扫描速度,有助于提高焊接效率。然而,3D结构光技术也存在一些局限性,由于其基于光栅投影,精度通常低于线激光相机,因此在高精度焊接场景中可能表现不足。
3.多线扫描
为了解决线激光和结构光两种技术路线分别存在的缺陷,结合两者的优势,中科融合自主开发高功率激光多线扫描技术,在同一台相机上可实现多线扫描、面结构光扫描,既保证高精度,又提高扫描速度。该技术具备使用简单,不需要配合位移的机械结构、高精度、能直接生成场景的完整点云、抗反光能力强、能够兼容面结构光等特点。
多线扫描投射示意图
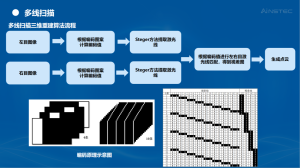 多线扫描成像效果对比
多线扫描成像效果对比
 抗互反能力:多线扫描与面结构光对比
抗互反能力:多线扫描与面结构光对比
 抗强光能力:多线扫描与面结构光对比
抗强光能力:多线扫描与面结构光对比
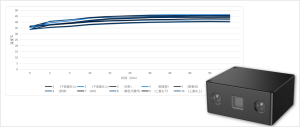
 多线扫描的热稳定性
多线扫描的热稳定性

结合多线扫描技术,中科融合全新升级了MINI F紧凑型高精度3D成像模组。
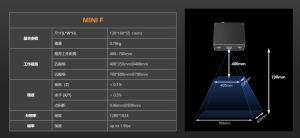
MINI F是专为焊接场景设计开发,可内嵌或安装在协作机器人手臂上的轻量化、高性能3D成像模组,该相机基于Ainstec 第二代深度相机架构设计,引领眼上手深度相机的性能革新,为协作机器人赋予强大深度感知能力。超小型3D成像模组,体积小、重量轻,方便安装于机械臂上;采用大功率激光光源,抗环境光干扰能力极强。可广泛适用中、近距离高精度引导、抓取、焊缝寻位等场景。
 升级后的MINI F紧凑型高精度3D成像模组在原有功能基础上配备了增强型硬件盖板,具备抗高温和防火花的设计,确保在极端环境下的稳定性和可靠性。这一创新使得相机在焊接高温作业中能够有效防止热损伤和火花侵害,从而延长设备的使用寿命。
升级后的MINI F紧凑型高精度3D成像模组在原有功能基础上配备了增强型硬件盖板,具备抗高温和防火花的设计,确保在极端环境下的稳定性和可靠性。这一创新使得相机在焊接高温作业中能够有效防止热损伤和火花侵害,从而延长设备的使用寿命。
同时,MINI F支持气冷和水冷系统,进一步提升了其散热能力,确保在长时间高强度工作条件下,设备仍能保持良好的性能表现。这些特点使得MINI F紧凑型高精度3D成像模组成为工业应用中的理想选择,能够在严苛的操作环境中持续提供高质量的三维视觉数据。
 结语
结语